研究紹介
照明光の個体差を用いたスタンドアローン自己位置推定
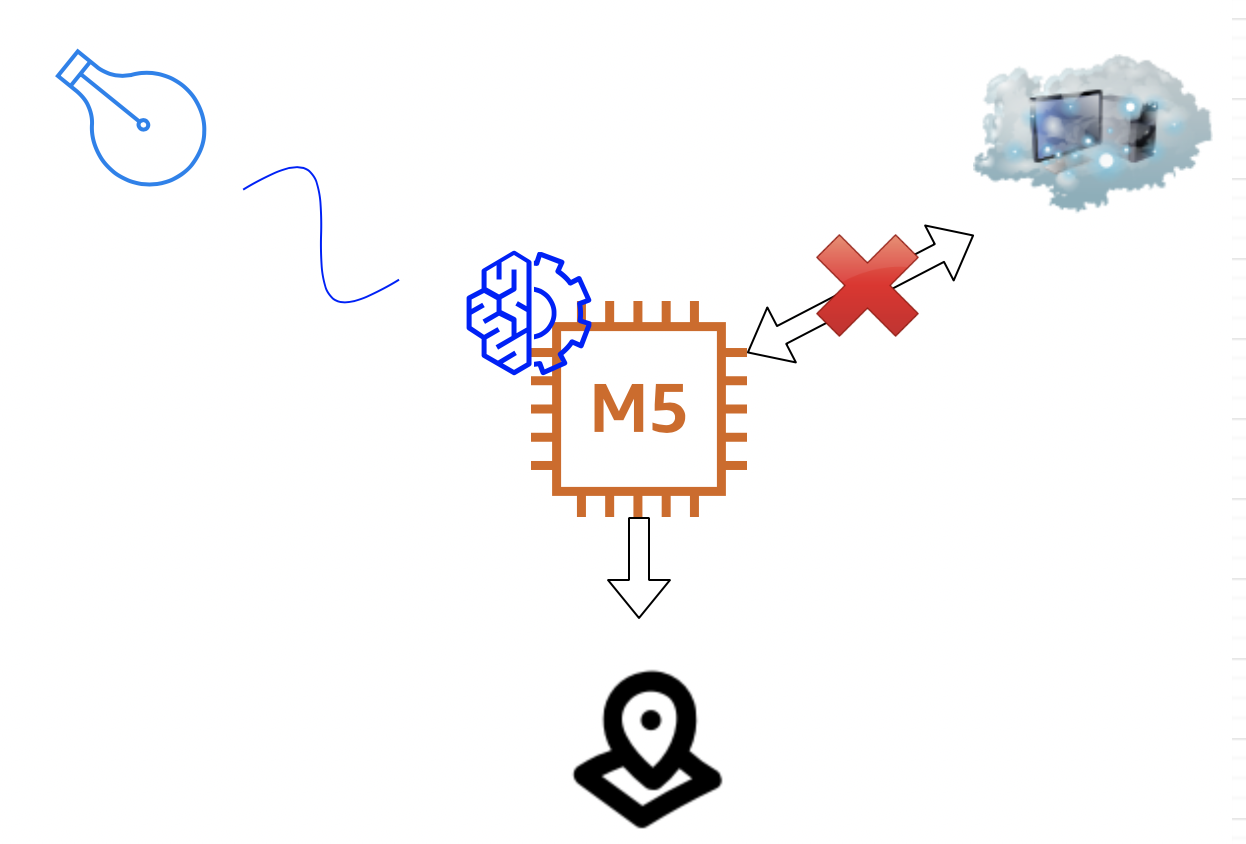
従来は取得した照明光をクラウド上のAIで識別していましたが、ネットワークなどに繋げない環境下は自己位置推定を正確に行えませんでした。
そこで本研究ではデバイスのみで完結した自己位置推定を目指します。
研究担当 : 藤崎 優樹
従来は取得した照明光をクラウド上のAIで識別していましたが、ネットワークなどに繋げない環境下は自己位置推定を正確に行えませんでした。
そこで本研究ではデバイスのみで完結した自己位置推定を目指します。
研究担当 : 藤崎 優樹