






研究室にはドローンがたくさんありますね。
消防防災活動においてドローンを使って被害状況を素早く把握するなど、利活用に向けた研究に取り組んでいるからです。
きっかけは2011年の東日本大震災です。あの大災害を目の当たりにし、自分にできることが少しでもないかと考えました。ちょうどその頃、プログラムで制御できるドローンが登場し始め、「これを活用すれば、新しい未来が開けるかも」と感じたのです。また、私の専門はモバイルネットワークで、これをドローンと組み合わせれば、災害時に役立つ技術が生み出せるのではないかと考え、研究をスタートさせました。
なぜ、ドローンですか?
どのように研究を進めていますか?
新しい技術を実際に活用できるものにするには、開発面と運用面の両方からのアプローチが欠かせません。そのためには、まず現場の課題を正しく理解することが重要です。私たちは高知市消防局と協定を結び、消防防災の現場で本当に役立つドローン技術に関する研究を共同で進めています。
例えば、山中の行方不明者を捜索するシナリオで、消防隊員がドローンを操縦して捜索する実験を行いました。ドローンにはカメラが搭載されているため、上空からの映像を撮影し、広範囲を捜索することができます。しかし、木の影や茂みの中にいる人は、映像だけでは発見が難しいことがあります。そこで、多くの人が持っているスマートフォンやゲーム端末などが発する電波を捜索の手掛かりにすれば、より効率的に捜索できるのではないかと考え、ドローンに電波を探知できるセンサーを取り付け(図1)、電波情報を活用した新しい捜索方法を試みました。
その結果、電波情報を活用することで捜索範囲を効率的に絞り込めることが分かり、より迅速な救助につながる可能性があることが明らかになりました。また、収集した映像情報に加え、電波情報を分析し、地図上に可視化することで、インターネットを通じて遠く離れた消防局からでもリアルタイムで現場の状況を把握できるようになります(図2)。
-
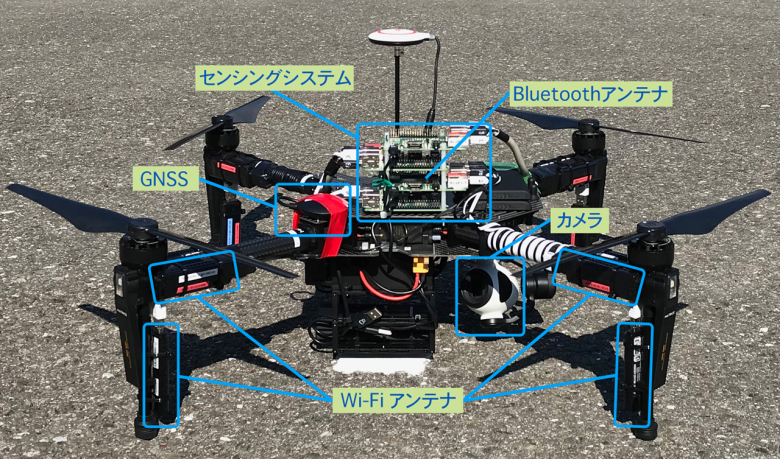
(図1)電波を探知できるセンサーを取り付けたドローン
※GNSS:Global Navigation Satellite System(全球測位衛星システム) -
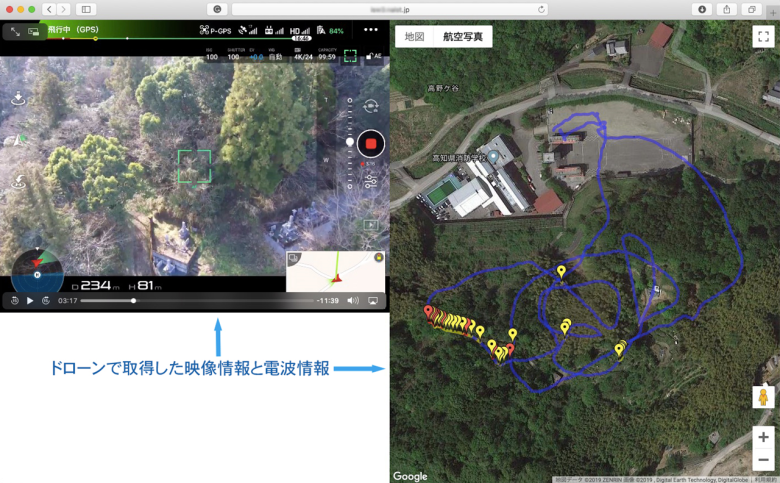
(図2)収集した映像情報(左)と電波情報(右)を地図上に可視化し、現場の状況をWebアプリで確認。右図の紫の線はドローンの飛行ルートを示し、赤色や黄色のマークは電波を探知した位置を示す。黄色より赤色の方が電波が強い。
消防防災の現場ではドローンの利用は進んでいるのでしょうか。
消防防災活動におけるドローンの利活用は強く期待されており、消防局での機体保有率も増加傾向にあります。しかし、ドローンの導入や運用方法の体系化は十分に進んでおらず、多くの課題が残っています。例えば、捜索時にドローンを使用する際、どの部隊が、いつ、どのようにドローンを運用するのか、また取得したデータをどのように本部や指揮隊へ伝達し、どのように活動に生かすのかなど、実践を通して検討していく必要があります。
また、ドローンやその周辺装置は日々進化しており、それに対応することも大きな課題の一つです。最近では、FPV(First Person View=1人称視点)ドローンが登場し、操縦者はゴーグルを装着してリアルタイムに空撮映像を確認しながら、片手で簡単に操縦できるほどになっています。しかし、こうした最新機器を受け入れる体制や、操縦者の育成に向けた柔軟な対応は、まだ発展途上の段階です。
ドローンが社会のインフラとして定着するには、どのようなことが必要ですか?
現在、車の運転ができることは特別なことではありません。ドローンも同じように、誰もが当たり前に使える存在にするためには、幼いころから気軽に触れる機会を増やし、新しい文化として定着させることが重要だと考えています。そこで、研究室ではドローンの普及を見据え、小学生向けのエデュテインメントの開発に取り組んでいます(写真1、2、動画)。エデュテインメントとは、教育(Education)と娯楽(Entertainment)を組み合わせた造語で、遊びながら学ぶことのできるコンテンツを指します。
この取り組みは、2021年にドローンに興味を持った研究室の学生が「小学生でも楽しめる教育方法を開発したい」と考えたことをきっかけにスタートし、その後、後輩たちが継続して研究室のプロジェクトとして発展させてきました。
-
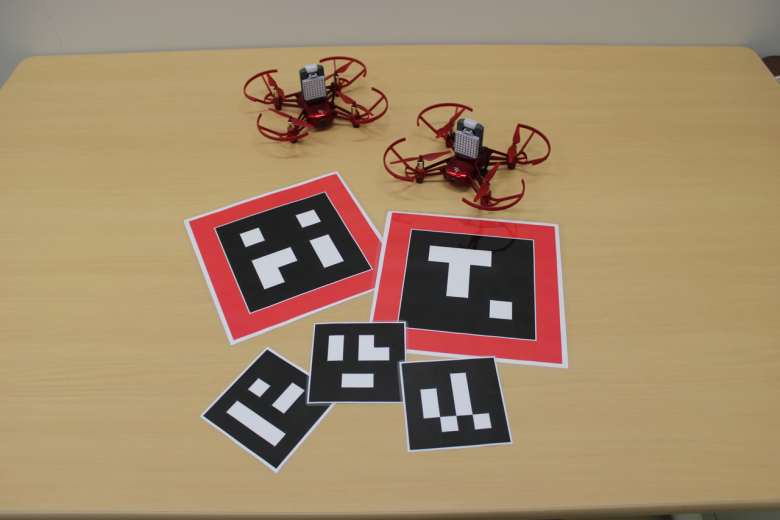
(写真1)エデュテインメントに使う得点用・操縦用ARマーカーとドローン -
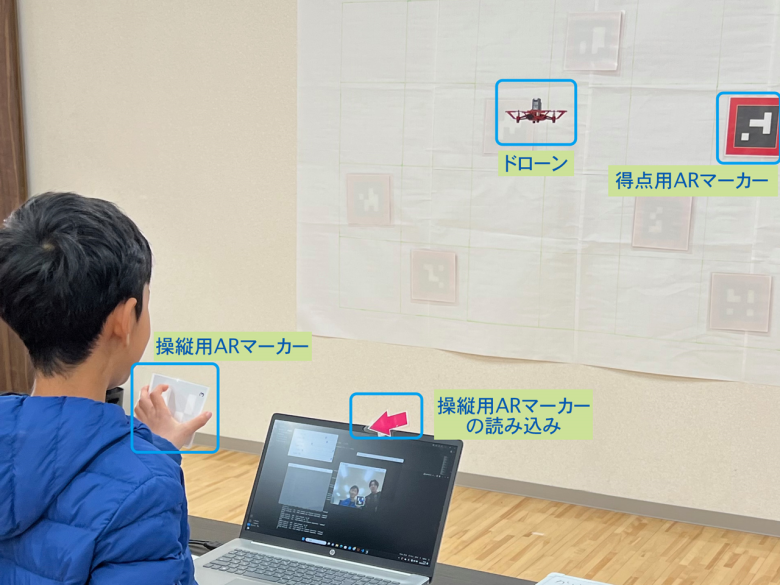
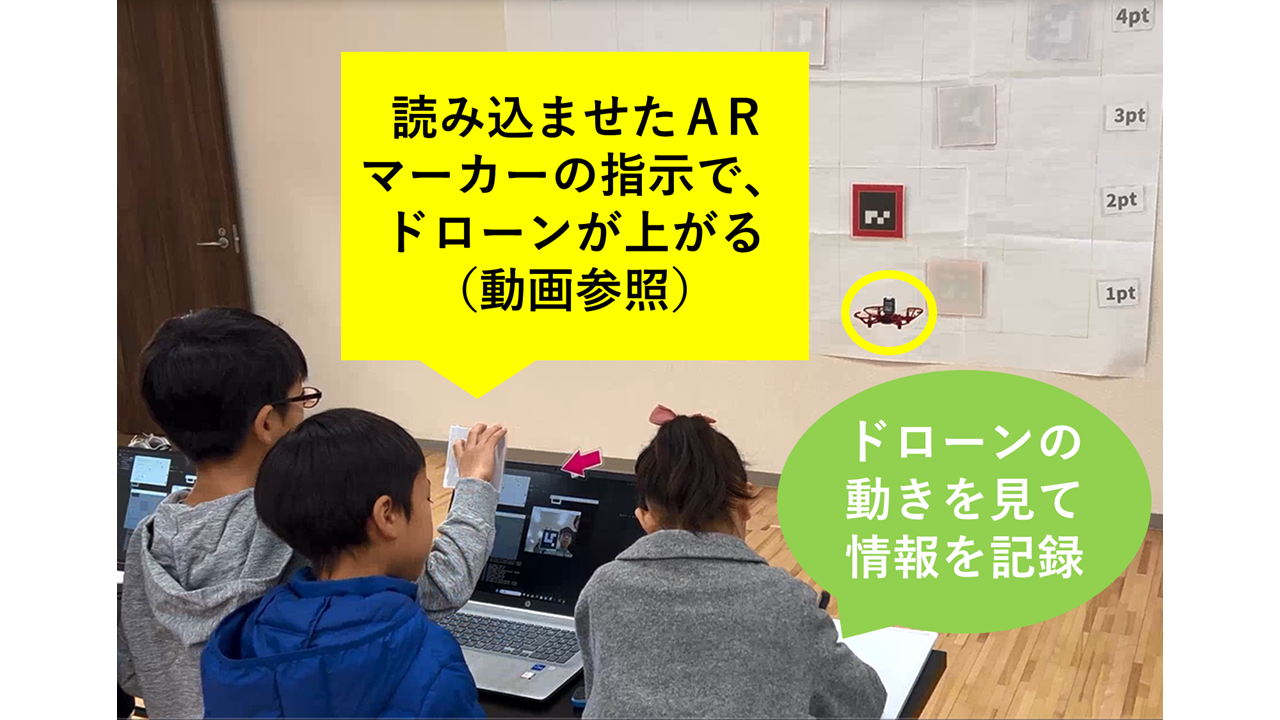
(写真2)操縦用ARマーカーでドローンを操作し、壁に貼り付けられた得点用ARマーカーをドローンで読み込むゲーム
開発されたエデュテインメントはどんな内容ですか?
壁に貼られた得点用ARマーカーをドローンのカメラで読み取ると、点数が獲得できるゲームです。ただし、操縦にはコントローラーを使用せず、パソコンのカメラで操縦用ARマーカーを読み取ることで、無線でドローンに指示が送られ動作します。
ARマーカーとはQRコードのように白黒の画像に情報を埋め込んだもので、得点用ARマーカーには得点情報が、操縦用ARマーカーには「左に30センチ移動」「上に10センチ移動」などの指示が含まれています。操縦用ARマーカーは画像ごとに異なる情報が埋め込まれており、プレーヤーは事前にどのARマーカーがどのような動きをするのか知らされていません。そのため、カメラに読み込ませた際のドローンの動きを観察し、それぞれのARマーカーが持つ情報を推測する必要があります。どのARマーカーをどの順番で使用してドローンを操作すれば、より短時間で高得点を獲得できるかをチームで考え、戦略を立てて他のチームと競い合います(写真3、4、動画)。
-

(写真3) -
(写真4) -
研究への思いを教えてください。
現在、サイバー空間は現実空間と高度に融合しつつあります。しかし、サイバー空間の秩序が優先され、ヒトがそれに制御されるような世界になってしまっては、面白みがありません。そうではなく、ヒトがサイバー空間を道具として使いこなし、ヒトが自ら意思決定を行い、それをもとに、新たに豊かな社会を創造していくことが重要だと考えています。世界は広く、多様な価値観が存在し、それ自体が面白さにつながっています。そうした中で、サイバー空間がヒトにとって真に価値あるものとなるための研究を、工学的視点にとどまらず、学際的な視点からも社会と密接に連携しながら進めていきます。
2025年4月には、枚方キャンパスにIoTやAIなどの最新デジタル技術を活用した社会や生活の変容を実験できる大規模実証実験施設「DXフィールド」(写真5)が誕生します。幅30×奥行40×高さ20メートルと国内最大級のスペースを備え、天候に左右されずに多数のドローンの飛行やロボットの実験を行うことが可能です。これを活用し、幅広い実験を通じて、未来の社会に貢献できる研究を進めていきたいと考えています。
-

(写真5)大規模実証実験施設「DXフィールド」 -

研究室では韓国からの交換留学生(前列手前から2人目と3人目)も交え、学生同士が活発に議論しながら研究を進めている