






1. 極限環境とは?
一般的な人・動植物の生育環境から逸脱している特殊な環境のことを極限環境と呼びます。以下にいくつか例を挙げます。
・火災環境:燃焼や爆発により高温環境下となり、有害ガスが発生し、煙や塵が巻き起こる環境。
・水害環境:豪雨や津波により、浸水・がけ崩れ・洪水などが発生している環境。
・汚染環境:重油流出事故による海洋汚染や原発事故による放射能汚染が発生している環境。
・宇宙環境:高真空・高放射線・無重力といった特徴のある環境。
2. 機械工学の4力とは?
機械工学は主に4つの力学を基礎としていることが広く知られています。材料力学・流体力学・熱力学・機械力学が、機械工学の4力と呼ばれています(図1参照)。通常、ロボットの開発研究に必要な知識として、ロボット工学・制御工学・計測工学などが挙げられますが、それらは全て機械力学分野に分類されます。

3.極限環境ロボットの研究開発とは?
通常環境で活躍するロボットの開発では、機械力学の知識は必要ですが、熱力学・流体力学・材料力学の知識の必要性はあまり高くありません。しかしながら、極限環境で活躍するロボットを開発する場合、機械力学の知識だけでは不十分であり、状況に応じて、熱力学・流体力学・材料力学の知識も必要になります。例えば、火災環境でミッションを遂行するロボットを開発する場合、熱力学に属する燃焼工学の知識や、材料力学に属する高温に強い材料の知識などを活用しながらロボットの開発を行う必要があります。水害環境でミッションを達成するロボットを開発するためには、流体力学の知識が必要になります。さまざまな極限環境下でさまざまなミッションを達成するために、機械工学の4力を駆使してロボット開発を行うことが、極限環境ロボットの研究目的です。
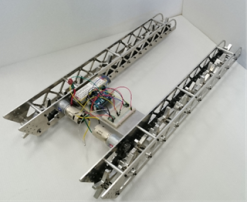
当研究室で行っている極限環境ロボットの研究開発の一例として、消火ロボットが挙げられます。瓦礫や階段などによる不整地を走行することができるロボットを開発したり(図2参照)、セラミックブランケットを用いてロボットに耐熱保護を施し、大阪工業大学八幡実験場の耐火炉でロボットの耐火実験を行ったりしています(図3参照)。火災環境において消火活動や人命救助に取り組めるロボットの開発に取り組んでいます。