





●視覚障がい者と盲導犬、どちらも快適に歩行できるハーネスのハンドルを開発しています。きっかけは何だったのでしょうか?
夫婦そろって犬好きです。10年ほど前には盲導犬のPR活動から引退した犬を飼っていたこともあります。妻から「盲導犬のために何かデザインしてあげて」という言葉を受け、同じ学科の赤井愛教授と兵庫盲導犬協会に困りごとをヒアリングすることから始めました。盲導犬を取り巻く課題の中に「視覚障がい者がハーネスのハンドルを持つ時にひじや肩に負担がかかる」というものがありました。私の専門分野の構造デザインで解決できるテーマと考え、取り組み始めました。
●ハーネスにはどのような役割があるのでしょうか?
ハーネスを通じて視覚障がい者は盲導犬の動きを察知しています。盲導犬は視覚障がい者から行き先を聞いただけで道案内できるわけではありません。視覚障がい者が道順を記憶していて、直進や左折など細かく指示することで目的地にたどり着いているのです。そこで歩行中は、盲導犬が指示通りに動いているかを確認することが欠かせません。
ハーネスは犬の胴に巻くベルト「胴輪」と胴輪に固定するハンドルからなります。視覚障がい者はハンドルを持つ時に犬の体幹上部で持ちますが、腕を開いた姿勢になるため肩やひじに負担がかかります。この姿勢を長時間維持することは困難で、疲れると腕は下がります。すると、ハンドルが視覚障がい者側に傾き、視覚障がい者側から引き寄せられる力が大きくなって盲導犬は歩きづらくなります(写真1)。
ハーネスは犬の胴に巻くベルト「胴輪」と胴輪に固定するハンドルからなります。視覚障がい者はハンドルを持つ時に犬の体幹上部で持ちますが、腕を開いた姿勢になるため肩やひじに負担がかかります。この姿勢を長時間維持することは困難で、疲れると腕は下がります。すると、ハンドルが視覚障がい者側に傾き、視覚障がい者側から引き寄せられる力が大きくなって盲導犬は歩きづらくなります(写真1)。
-

(写真1)左は犬の体幹上部でハンドルを持つ正しい姿勢。右は視覚障がい者の腕が下がった姿勢で、ハンドルが傾くことにより視覚障がい者側に盲導犬は引き寄せられて歩きづらくなる
●ハンドルはどんな形をしていますか?

まずは従来型のハンドル。現在、一般に使用されている標準的な形状です(写真2)。

続いてねじり型。視覚障がい者が自然な姿勢で持てるよう、標準的な形をねじったものです(写真3)。
●研究室ではどんなハンドルを開発したのですか?

プロトタイプ(試作品)の直線型です(写真4)。

プロトタイプのだ円型です(写真5)。

プロトタイプを改良したy字型です(写真6)。
●開発したハンドルは非対称の形ですね。なぜですか?
①ユーザーが自然な姿勢でハンドルを持つことができる
②歩行時に盲導犬の両肩への負荷を均等にする
上記2点を考慮して、自然な姿勢で持つには体に近い位置に持ち手があることだと考えました。プロトタイプの直線型とだ円型について、盲導犬に装着した歩行実験から左右のアームにかかる力を計測しました。その結果や応力解析に基づく形態最適化などを生かして完成させたのがy字型になります(写真7)。
②歩行時に盲導犬の両肩への負荷を均等にする
上記2点を考慮して、自然な姿勢で持つには体に近い位置に持ち手があることだと考えました。プロトタイプの直線型とだ円型について、盲導犬に装着した歩行実験から左右のアームにかかる力を計測しました。その結果や応力解析に基づく形態最適化などを生かして完成させたのがy字型になります(写真7)。
-

(写真7)右から順に従来型、ねじり型、プロトタイプの直線型、だ円型、y字型
●y字型ハンドルの使い心地はどのように調べましたか?
盲導犬模型(写真8)を用いた歩行実験で従来型とねじり型、y字型ハンドルによる盲導犬への負荷を計測しました。その結果、y字型が左右にかかる力のバランスが良いという結果が出ました(図)。現在、y字型が持ちやすいからと実際に使っている視覚障がい者もいます(写真9)。しかし、ハンドルを一つ一つ手作りで製作しているため、樹脂やカーボンなどを使って簡易で安価に製作できる方法についても考えていきたいと思っています。
-

(写真8)盲導犬模型 -
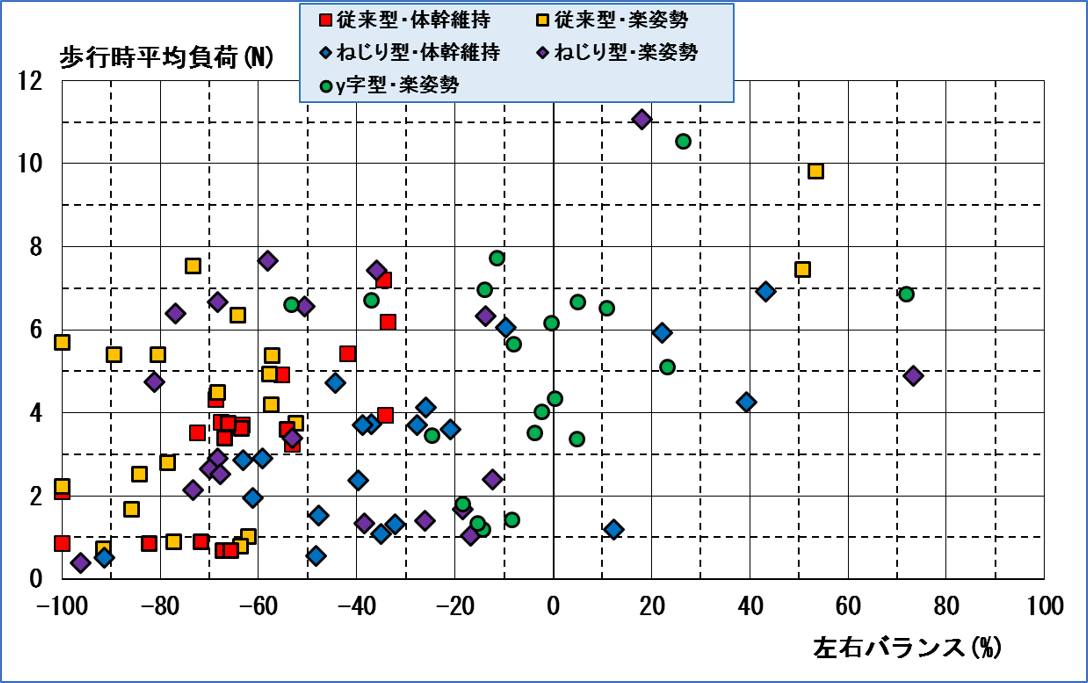
(図)盲導犬模型を用いた歩行実験でハンドルの左右のアームにかかる負荷を調べた。従来型(赤や黄の四角)やねじり型(青や紫のひし形)は左側に偏っているが、y字型(緑の丸)は中央に集まりバランスが取れていることが分かる -

(写真9)y字型ハンドルを付けて歩く盲導犬
●ハンドル以外で力を入れている研究や、本学の空間デザイン学科の魅力についても教えてください。
シミュレーションを用いて力の流れをコントロールするような形のデザインに関する研究(コンピュテーショナルデザイン)や、ロボットを用いてこれまでは実現することが難しかった形のデザイン(ロボティックファブリケーション)に関する研究も行っています。
ロボティックファブリケーションでは、作業用ロボット2台を使い、竹製のアーチ形式パビリオンを架設する方法を研究しています。竹のしなる特性を生かし、竹かごを編むようにして強度をつけるなど試行錯誤を重ねています(写真10、動画)。建設現場では労働者不足によりロボティクス技術の活用が進んでいます。主目的は労働者との協働や代替ですが、新たな空間の形態を創出することにもつながると考えています。
また、空間デザイン学科については、建築やインテリア、プロダクトデザインのそれぞれのデザイン分野を網羅して我々が生活する空間にあるものすべてをデザインの対象としています。ここで言う「デザイン」とは、「人々の暮らしを少し良くするアイデアをカタチにすること」だと考えています。私たちの暮らしの中には、「もう少し良くなればいいのに」という課題がたくさんあります。これを解決するアイデアを発想し、そのアイデアを実現するためのカタチをこれからも考えていきたいと思っています。
ロボティックファブリケーションでは、作業用ロボット2台を使い、竹製のアーチ形式パビリオンを架設する方法を研究しています。竹のしなる特性を生かし、竹かごを編むようにして強度をつけるなど試行錯誤を重ねています(写真10、動画)。建設現場では労働者不足によりロボティクス技術の活用が進んでいます。主目的は労働者との協働や代替ですが、新たな空間の形態を創出することにもつながると考えています。
また、空間デザイン学科については、建築やインテリア、プロダクトデザインのそれぞれのデザイン分野を網羅して我々が生活する空間にあるものすべてをデザインの対象としています。ここで言う「デザイン」とは、「人々の暮らしを少し良くするアイデアをカタチにすること」だと考えています。私たちの暮らしの中には、「もう少し良くなればいいのに」という課題がたくさんあります。これを解決するアイデアを発想し、そのアイデアを実現するためのカタチをこれからも考えていきたいと思っています。
-
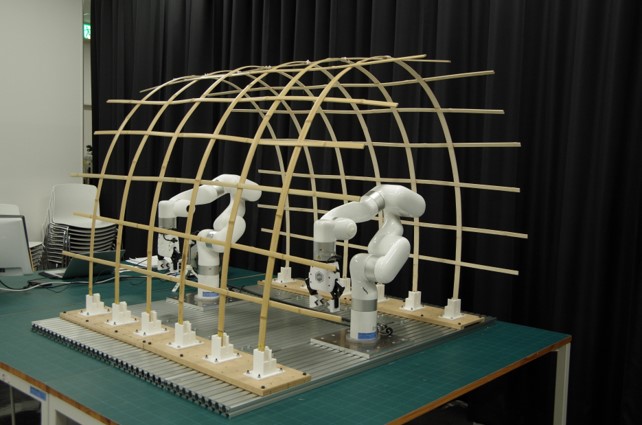
(写真10)ロボット2台で架設した竹製のアーチ形式パビリオン -

(動画)ロボットで竹を編む様子のイメージ
-
梅田の街を一望できる研究室。学生たちが活発に意見交換しながら研究を進めていた