





ロボティクス&デザイン工学部 ロボット工学科 フレキシブルロボティクス研究室

谷口 浩成Taniguchi Hironari
准教授
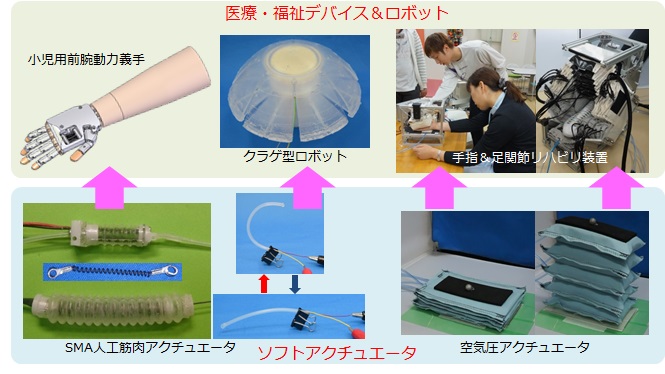
ロボットを動かすために必要なアクチュエータとは、エネルギーを機械的な運動に変換する装置のことで、駆動源とも呼ばれます。本研究室では、形状記憶合金人工筋肉アクチュエータ、空気圧ソフトアクチュエータ、機能性流体とゴムを融合したソフトアクチュエータなどの各種アクチュエータの開発と、それらのアクチュエータを利用した小児用動力義手、手指や足関節のリハビリ装置や、ミズクラゲ型のアニマルセラピーロボットの医療・福祉・介護デバイス・ロボットの研究開発を行っています。
Theme 主な研究テーマ
- 筋リラクゼーション運動と関節可動域訓練を提供するマルチリハビリテーションシステムの開発
- ユニバーサルユーザーインターフェースを備えた小児用前腕動力義手の開発
- ミズクラゲを模倣したアニマルセラピーロボットに関する研究
- 空気圧ソフトアクチュエータに関する研究
- 形状記憶合金人工筋肉アクチュエータに関する研究
Profile 教員プロフィール
谷口 浩成Taniguchi Hironari准教授
専門分野
- ソフトロボティクス
- アクチュエータ工学
- メカトロニクス
Message from the Faculty 教員メッセージ
医療・福祉・介護の分野において、機械システムやロボットの活躍が期待されています。本研究室では、こどもから高齢者まで幅広く対応した様々なデバイスやロボットの研究を行っています。特に、ソフトアクチュエータやソフトロボットに着目し、より安全でデザイン性にも優れた開発を目指しています。次世代に活躍する新しいロボットを一緒に創りましょう。
Message to current students 在学生メッセージ
研究は、新しいことへのチャレンジです。その中には、たくさんの発見と失敗と喜びがあり、その過程を通じて自ずと成長しているものです。しかし、そのためには、どれだけ真剣に取り組めるかだと思います。人任せではなく、自分で考え、自分で創り、自分で試してみてください。苦労して、失敗して、目標を達成するからこそ、社会に出て遭遇する多くの苦難にも立ち向かっていく力を身に付けられるのです。本研究室では、高い人間力と自律性を備えた技術者の育成を目指し、全力で学生をサポートします。