





工学部 電子情報システム工学科 システム制御研究室

奥 宏史Oku Hiroshi
教授
モデルベースト制御では、制御対象の動特性を表現する数学モデルに基づいて制御器を設計します。装置や機械の正確で精密な動作を実現する高性能な制御系設計には、精度の高いモデルが欠かせません。システム制御研究室は、システム・制御・モデリングをキーワードに、制御対象のモデルを、その対象の動作実験から得られるデータより獲得する方法(システム同定法)の開発や、システム同定によって得られるモデルを用いたフィードバック制御系設計および実装実験に取り組んでいます。また、システム同定の応用研究として、監視対象をオンラインで監視し、不具合が生じたときに早期に警告を発するオンライン故障検出法の開発を行っています。
Theme 主な研究テーマ
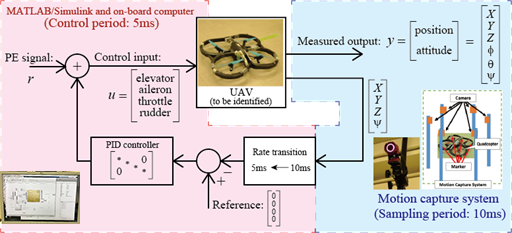
- ドローンのシステム同定によるモデリングと自律飛行制御系設計
- フィードバックをもつ多入出力システムに対するシステム同定法の開発
- データ駆動型オンライン故障検出法の開発
- 自律走行車両群のフォーメーション制御
Profile 教員プロフィール
奥 宏史Oku Hiroshi教授
専門分野
- 制御工学
- システム同定
- データ駆動モデリング
研究室がめざすSDGs

Message from the Faculty 教員メッセージ
対象を制御するためには、その対象についてよく知ることが大事です。さらに、その対象を特徴付ける最も重要な部分、つまり、「本質」を見抜く力が大切です。また同時に、自分にはどこまでできてどこからはできないのか、限界をわきまえることも重要です。なぜなら制御技術は万能ではないからです。「彼を知り己を知れば百戦殆からず」が制御の本質を表しています。機械や装置を思ったとおりに自在に操ることができたときの感動は言葉では表せません。制御工学では、数学や物理を駆使して、ものの本質を探究し、問題に論理的に立ち向かう方法を学ぶことができます。