





ロボティクス&デザイン工学部 システムデザイン工学科 知能ロボティクス研究室

小林 裕之Kobayashi Hiroyuki
教授
"ロボットの知能化"をテーマとして、さまざまな基礎技術に取り組む研究室です。ロボットが移動中に自分自身がどこにいるのかを考える『自己位置推定問題』、複数の自律ロボットが互いに協調して作業する『自律分散システム』、そして自律ロボットが周囲の環境に応じて自らの行動パタンを変えてゆく『機械学習』、さらには人とロボットの相互接続を目指す『マン・マシンインタフェース』の研究などを行っています。研究テーマはさまざまですが、知的なロボットを実現するためにいろいろなことにチャレンジしています。
Theme 主な研究テーマ
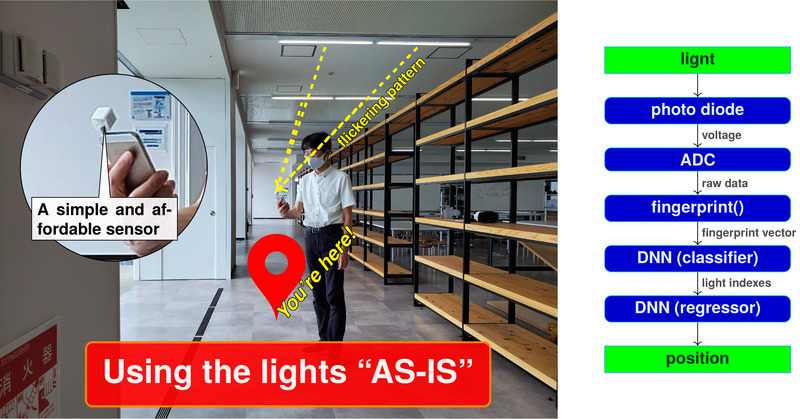
- 移動ロボットの自己位置推定
- 自律分散システム
- AI・IoT・スマートデバイス応用
- 移動ロボットの行動アルゴリズムの機械学習
Profile 教員プロフィール
小林 裕之Kobayashi Hiroyuki教授
専門分野
- IoT応用
- 移動ロボット
- AI応用
- 群ロボット
